

Członkowie Koła Naukowego Elektroautomatyki przy współpracy z firmą Eurohover sp. z o.o., podczas prac warsztatowych stworzyli prototyp kadłuba poduszkowca.

Studenci tworzą innowacje
Na potrzeby realizacji programu „Studenckie koła naukowe tworzą innowacje" członkowie Koła Naukowego Elektroautomatyki (KNEA) wykonali, przy współpracy z firmą Eurohover sp. z o.o., korpus (kadłub) poduszkowca.Stworzony kadłub wykonany jest z włókna węglowego wzmocnionego kevlarem, który wyposażony został we wzmocniony fartuch oraz płyty wypornościowe uniemożliwiające jego zatopienie. Zastosowane materiały konstrukcyjne pozwoliły uzyskać masę poniżej 80 kg. Kadłub wyposażony został w silnik spalinowy wraz z bakiem oraz układami wtryskowym i zapłonowym.
Całość układu napędowego została wyposażona w automatykę pozwalającą na zdalne jego załączanie oraz wyłączanie. Jednostka została wyposażona w kamerę, pracującą również w trybie nocnym, pozwalające operatorowi na obserwację terenu w czasie rzeczywistym.
Zrealizowane cele
- zaprojektowano oraz wykonano korpus jednostki (poduszkowca) wraz z napędem;
- opracowany został układ zdalnego sterowania jednostką, pozwalający na pełną zdalną kontrolę nad jej systemami składowymi takimi jak kamery, echosonda i sonar, oświetlenie;
- dobrane zostały kamery gwarantujące możliwie najwyższą jakość obrazu przy zastosowanym sposobie komunikacji;
- układy służące do prac poszukiwawczo-ratunkowych, takiej jak kamera termowizyjna, sonar i echosonda zostały sprzężone w jeden system.
Szukamy nowoczesnych rozwiązań
W rezultacie stworzono nowe rozwiązanie technologiczne, jakim jest zdalnie sterowana jednostka bezzałogowa na platformie poduszkowca, której zadaniem jest wspomaganie prac poszukiwawczo-ratunkowych prowadzonych na wodzie oraz jej pobliżu (bagna, brzegi, plaże, mielizny).Stworzona jednostka jest łatwa w transporcie oraz, ze względu na wykorzystanie w jej budowie materiały i rozwiązania technologiczne, odporna na warunki środowiskowe i niezatapialna. Sterowanie jednostką może być prowadzone z dystansu minimum 2 km w terenie otwartym.
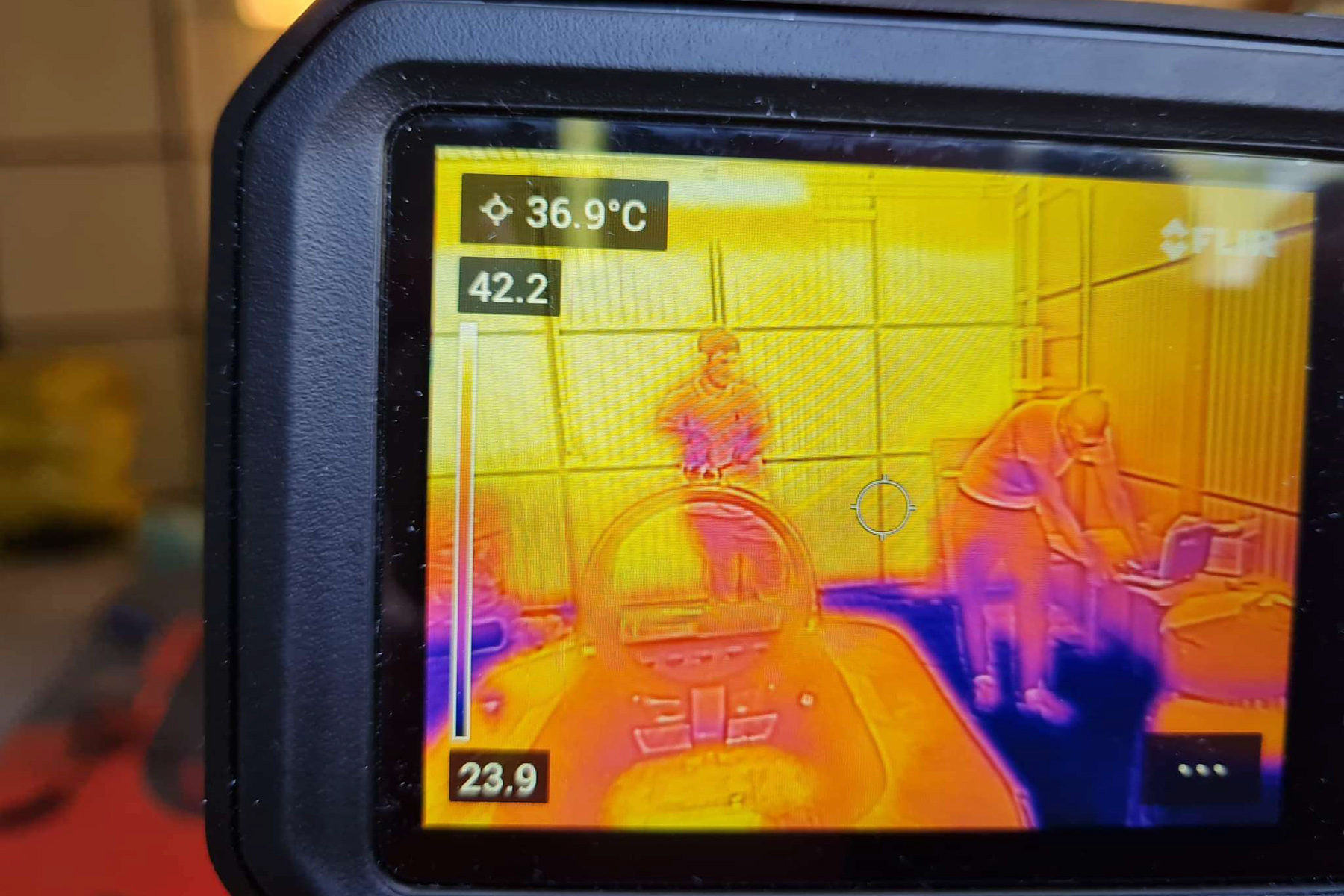
Ujęcie z kamery termowizyjnej podczas prac warsztatowych dokonywanych przez studentów KN Elektroautomatyki
Próby jednostki z udziałem nurków
Przeprowadzono próby jednostki, w zakresie lokalizacji osoby znajdującej się pod wodą, z udziałem nurka z uprawnieniami International Diving Federation (IDF) Staff Instructor.Wyposażenie prototypu w osprzęt poszukiwawczo-ratunkowy
Prototyp jednostki bezzałogowej wyposażony został w urządzenia ułatwiające operatorowi prowadzenie akcji poszukiwawczo-ratunkowej. Urządzeniami takimi są kamera termowizyjna (poszukiwanie zaginionych na powierzchni wody) oraz echosonda z sonarem (poszukiwania podwodne).Inne wyposażenie ratownicze stanowią boja ratownicza SP 2, kamizelka pneumatyczna automatyczna z uprzężą bezpieczeństwa Mullion Stream 150N oraz flary ręczne w kolorze czerwonym, które zamontowane zostały w sposób pozwalający osobie znajdującej się w wodzie na ich pobranie z jednostki. Ze względu na wtopione w kadłub płyty wypornościowe operator może wyłączyć silnik jednostki i pozwolić na wykorzystanie jej jako tratwy.
Próby prototypu
Na każdym etapie budowy przeprowadzane były próby prototypu. Każdy z jego systemów: napęd, sterowanie, transmisja obrazu z kamer cyfrowej oraz termowizyjnej, sterowanie oświetleniem, transmisja sygnału oraz odczyt pozycji z AIS, transmisja danych z echosondy/sonaru, działa zgodnie z założeniami projektowymi.Poduszkowiec przetestowany został na placu manewrowym (na lądzie) oraz w basenie portowym (na wodzie) na terenie Ośrodka Szkoleniowy Ratownictwa Morskiego (OSRM) Politechniki Morskiej w Szczecinie.

